Grobot - autonome Beetpflege
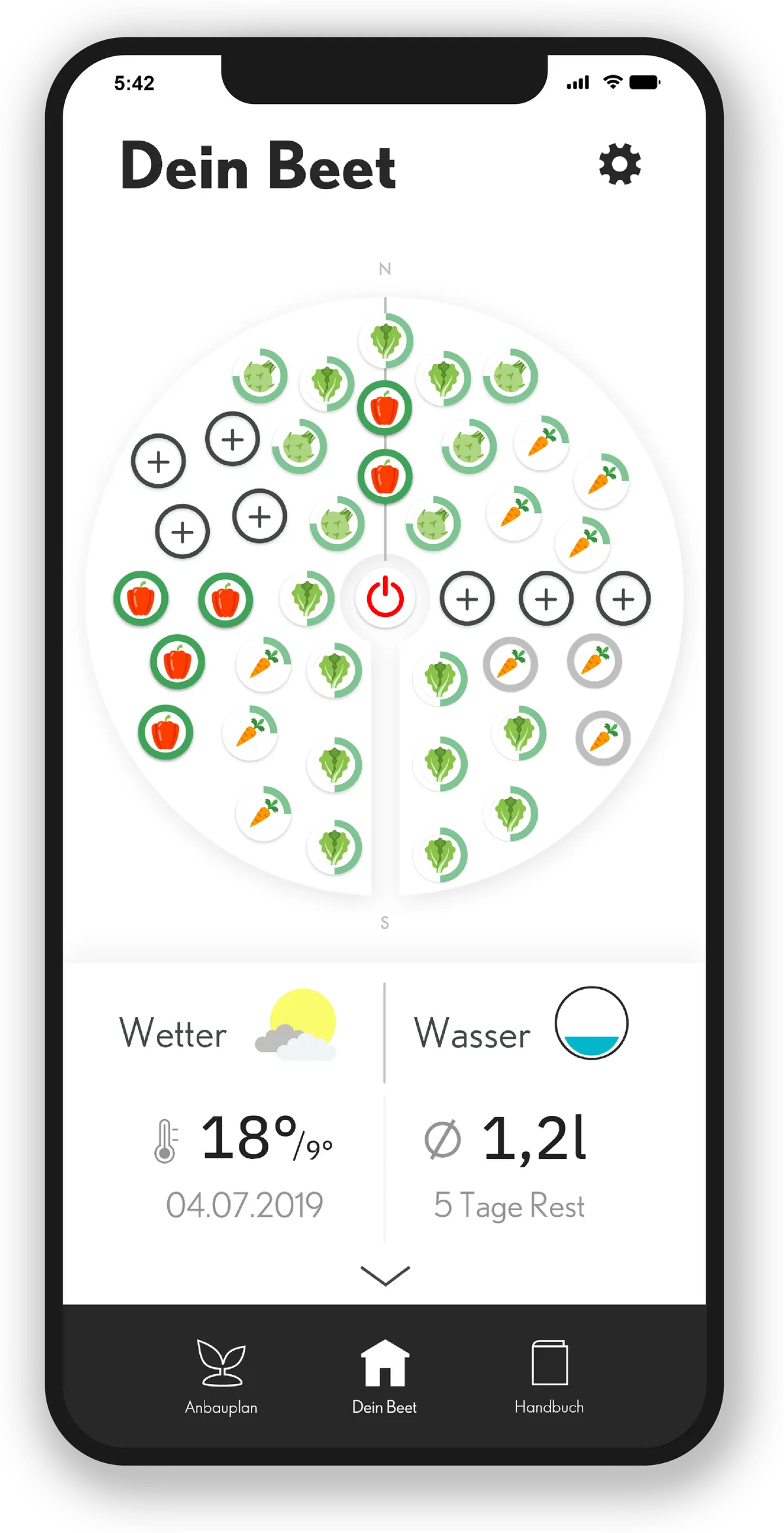
Dieser Gartenroboter stellt eine Komplettlösung für die Automatisierung des privaten Urban Farmings dar. Der Roboter erledigt die Arbeit im Beet während die App dem Nutzer die Kontrolle über den Anbauprozess ermöglicht und Einsicht in nötige Information gewährt.